近年、各所で自動運転の路線バスが走っているが、そのほとんどは実験段階である「レベル2」。これは、アクセルとブレーキによる加減速と、ハンドル操作による左右の制御をシステムを使い自動で行なうものの、あくまで運転手が主体で操作をする。すなわち、システムはそのサポートという位置づけになるのだ。特定の条件下で、運転手を乗車させずに完全な自動運転を行なうことが可能な「レベル4」は、2027年度には実現するといわれている。
路線バスの自動運転化が急がれているのは、安全面や利便性の問題だけではない。少子高齢化による人口の減少でバス会社は採算の取りにくい状況に陥り、人件費削減による抜本的なコストダウンを迫られているからなのだ。さらに、運転手の残業時間に上限が設けられたことでその大幅な不足が生じている。ところが、新たな担い手を簡単に確保できないのが現実だ。これらの対策のひとつとして、自動運転が期待されているというわけである。
ただ、レベル2はあくまで通過点に過ぎない。バス業界にのしかかる先のような問題を解決するためには、運転手が乗車しない自動運転レベル4に到達する必要がある。その前段階として必要なのが、遠隔監視システムなのだ。これはレベル2でも行なわれているのだが、特に運転手のいないレベル4の自動運転では、乗客の安全を守るために欠かせないシステムといえる。
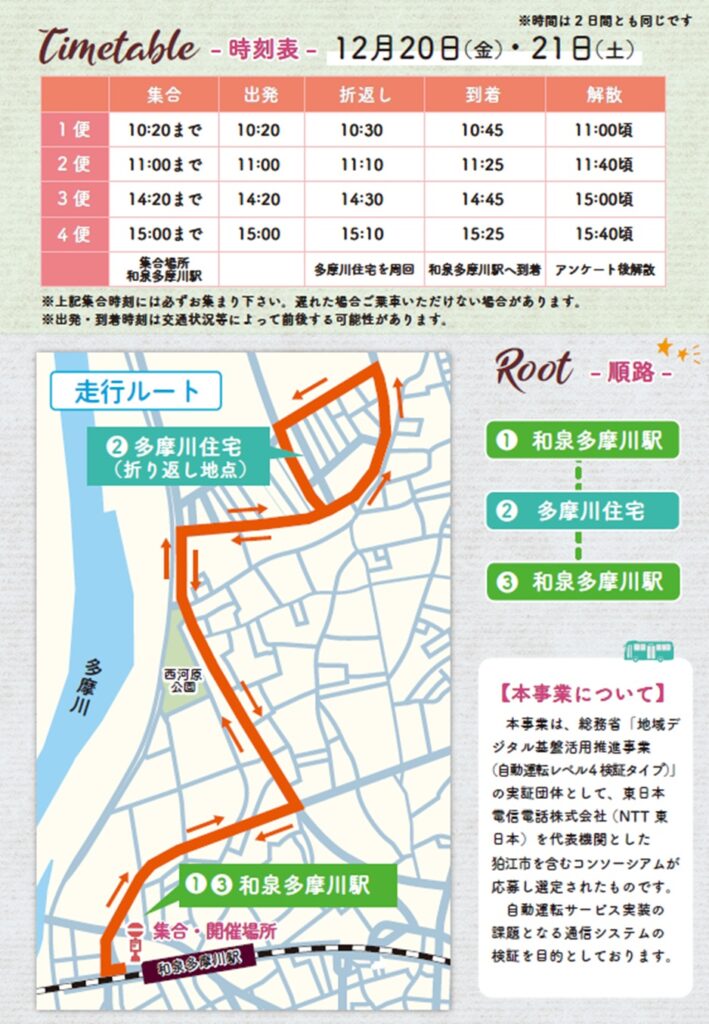
そのようななかで、2024年に従来の自動運転レベル2より一歩進んだ遠隔型自動運転バスを走らせたのが、狛江市である。同市は東京都の多摩地区に位置し、ベッドタウンとして発展した街。東京23区に隣接しており交通の便も良いことから、今も人口が増加傾向にあるという。さらに、この後も多摩川住宅地区において大規模な開発が予定されていることから、路線バス網を充実させなければならないといった事情がある。
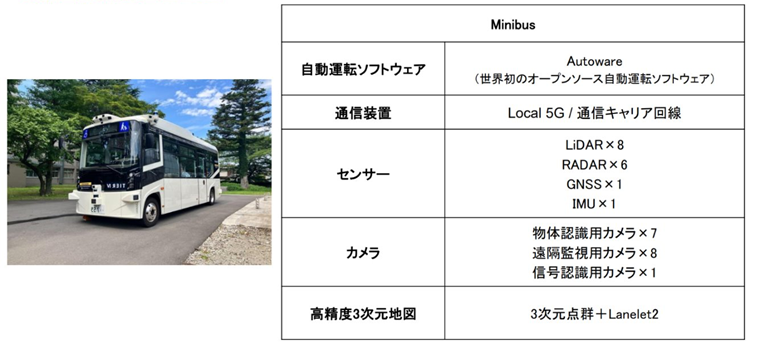
遠隔型とはローカル5Gなどの無線通信を利用して、車両走行時の映像や音声を遠隔監視拠点と通信で結ぶものだ。また、走行経路付近の道路上にスマートポールを設置し、そこで得た情報も車両や遠隔監視拠点に配信をする。このポールには各種センサーが取り付けられており、近辺を通行する人・自転車・車両などの情報をキャッチすることができるのだ。ここで得た情報を分析して交通状況を先読みすることで、自動運転バスをスムーズに走行させようというのである。

遠隔監視は人によって行われるが、システムが進化すれば少人数で多数の車両を監視することが可能になる。実際に、東京の「ゆりかもめ」や「舎人ライナー」に代表される新都市交通では、すでに遠隔型自動運転システムが実用化しているのだ。ただ、専用軌道を利用する新都市交通とは違い、路線バスは人や他の車両などが多数通行する一般道路を走る。そこで、それらの動きを把握するスマートポールを使うようなシステムが必要になるのだ。
今回の遠隔型自動運転レベル2のバスは、期間を限定して市民を対象とした試乗会を行なっている。乗車した市民の感想は概ね肯定的であったことから、レベル4の2027年度実現に向けて大きな弾みになったようだ。今後は、技術の検証を重ねてシステムの精度を向上させることになるのだという。SFの世界でしか見られなかった自動運転バスは、もうすぐそこにまで来ているようだ。